Quentin Boehler
Biography
Quentin Boehler was born in Strasbourg in 1990. He received a M.S. degree in mechatronics from INSA Strasbourg in 2013, and a Ph.D. degree in robotics from ICube laboratory, University of Strasbourg in 2016 in collaboration with the LIRMM in Montpellier. His thesis focused on tensegrity mechanisms and variable stiffness devices with application to MR-compatible robotics, and was awarded the best thesis award from the research commission of the University of Strasbourg, and the first prize at the 2016 Ph.D. thesis awards from GDR Robotique.
He joined the Multi-Scale Robotics Lab in 2017 as a postdoctoral associate. He is currently senior researcher and his research is on magnetic actuation for medical robotics, including the development and analysis of electromagnetic navigation systems, and of soft magnetic robots.
Contact
Email
GitHub
Google Scholar
ResearchGate
ORCID
LinkedIn
Publications
Advanced Intelligent Systems, 2024
Harun Torlakcik,
Semih Sevim,
Pedro Alves ,
Michael Mattmann,
Joaquim Llacer-Wintle ,
Maria Pinto ,
Rosa Moreira ,
Andreas D. Flouris ,
Fabian C. Landers ,
Xiang-Zhong Chen,
Josep Puigmartí-Luis,
Quentin Boehler,
Tiago Sotto Mayor ,
Minsoo Kim,
Bradley J. Nelson,
and
Salvador Pane
Advanced Science, 2024
Simone Gervasoni,
Norman Pedrini ,
Tarik Rifai ,
Cedric Fischer,
Fabian C. Landers ,
Michael Mattmann,
Roland Dreyfus,
Silvia Viviani,
Andrea Veciana ,
Enea Masina ,
Buse Aktas ,
Josep Puigmartí-Luis,
Christophe Chautems,
Salvador Pane,
Quentin Boehler,
Philipp Gruber ,
and
Bradley J. Nelson
Advanced Materials, 2024
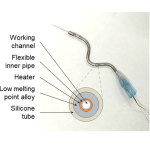
IEEE Robotics and Automation Letters, 2023
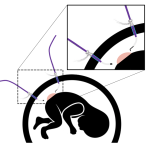
Roland Dreyfus,
Quentin Boehler,
Sean Lyttle,
Philipp Gruber ,
Jonas Lussi,
Christophe Chautems,
Simone Gervasoni,
Jatta Berberat ,
Dominic Seibold ,
Nicole Ochsenbein,
Michael Reinehr ,
Miriam Weisskopf ,
Luca Remonda ,
and
Bradley J. Nelson
Science Robotics, 2024
IEEE Transactions on Robotics, 2023
International Symposium on Medical Robotics (ISMR), 2023
Nature Communications, 2023
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Advanced Intelligent Systems, 2022
IEEE Transactions on Magnetics, 2022
IEEE Transactions on Robotics, 2022
Nature Machine Intelligence, 2022
IEEE Robotics and Automation Letters, 2022
IEEE Robotics and Automation Letters, 2022
The International Journal of Robotics Research, 2022
Advanced Functional Materials, 2022
IEEE Transactions on Medical Robotics and Bionics, 2022
IEEE Transactions on Robotics, 2021
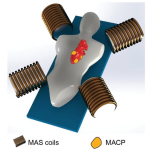
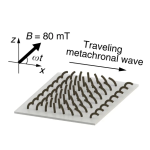
Hongri Gu,
Quentin Boehler,
Haoyang Cui,
Eleonora Secchi,
Giovanni Savorana,
Carmela De Marco,
Simone Gervasoni,
Quentin Peyron,
Tian-Yun Huang,
Salvador Pane,
Ann M. Hirt,
Daniel Ahmed,
and
Bradley J. Nelson
Nature Communications, 2020
IEEE Transactions on Biomedical Engineering, 2020
Advanced Intelligent System, 2019
The International Journal of Medical Robotics and Computer Assisted Surgery, 2019
IEEE Robotics and Automation Letters, 2019
IEEE Robotics and Automation Letters, 2018
IEEE Robotics and Automation Letters 3, 2018