Simultaneous Localization and Actuation Using Electromagnetic Navigation Systems
Abstract
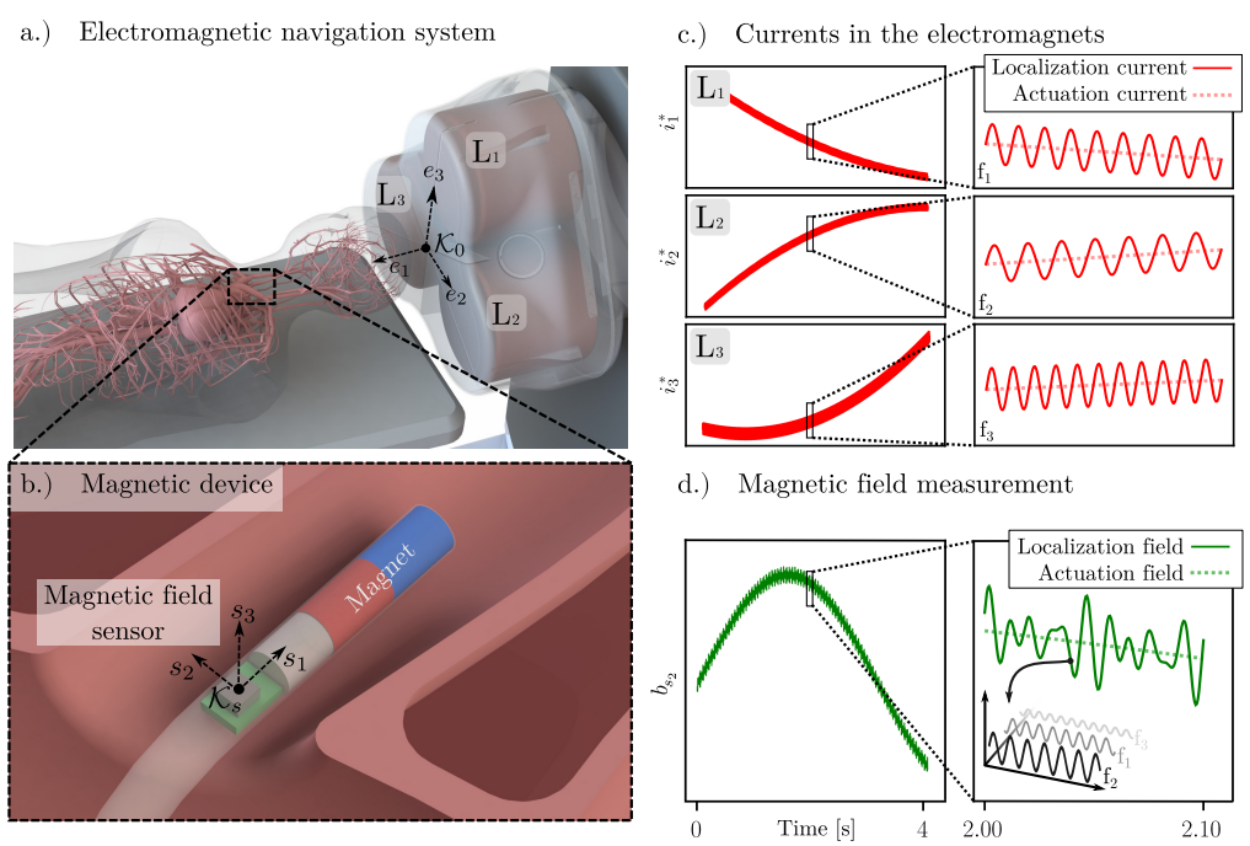
Remote magnetic navigation provides a promising approach for improving the maneuverability and safety of surgical tools, such as catheters and endoscopes, in complex anatomies. The lack of existing localization systems compatible with this modality, beyond fluoroscopy and its harmful ionizing radiation, impedes its translation to clinical practice. To address this challenge, we propose a localization method that achieves full pose estimation by superimposing oscillating magnetic fields for localization onto actuation fields generated by an electromagnetic navigation system. The resulting magnetic field is measured using a three-axis magnetic field sensor embedded in the magnetic device to be localized. The method is evaluated on a three-coil system, and simultaneous actuation and localization is demonstrated with a magnetic catheter prototype with a Hall-effect sensor embedded at its tip. We demonstrate position estimation with mean accuracy and precision below 1 mm, and orientation estimation with mean errors below 2 deg at 10 Hz in a workspace of 80 x 80 x 60 mm. This contribution aims to advance the clinical adoption of remote magnetic navigation in minimally invasive surgery.
News
This work was presented at ICRA 2024 in Yokohama!