Jonas Lussi

Biography
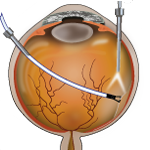
Jonas was born in Bern, Switzerland in January 1991. He completed his B.Sc. in Mechanical Engineering with focus on Mechatronics at ETH Zürich. His interest in Robotics was strengthened after gaining practical experience at ABB Corporate Research in Västerås, Sweden. Subsequently, Jonas acquired his M.Sc. in Mechanical Engineering from ETH Zürich and University of Toronto. During his M.Sc. he focused on Biomedical Engineering and Robotics and was particularly interested in finding automated solutions to difficult surgical procedures. After completing his Master’s thesis at ETH Zürich on the development of a robotic system to automate a key step in cataract surgery, Jonas joined the MSRL as a PhD student in February 2017.
Contact
Email GitHub Google Scholar ResearchGate