Christophe Chautems
Contact
Publications
A Human-Scale Clinically Ready Electromagnetic Navigation System for Magnetically Responsive Biomaterials and Medical Devices
Advanced Materials, 2024

Dexterous helical magnetic robot for improved endovascular access
Science Robotics, 2024
An Evaluation Platform for Catheter Ablation Navigation
International Symposium on Medical Robotics (ISMR), 2023
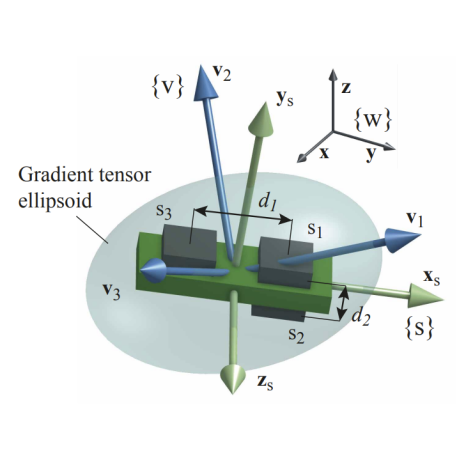
Gradiometer-based Magnetic Localization for Medical Tools
IEEE Transactions on Magnetics, 2022
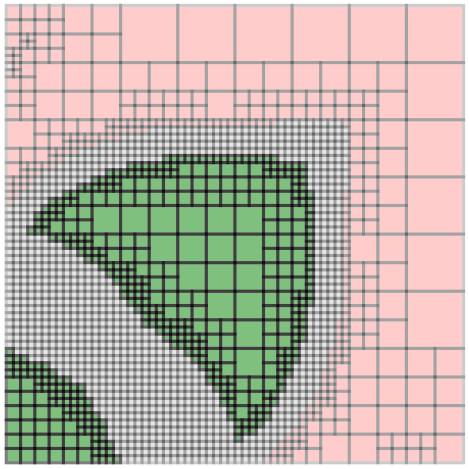
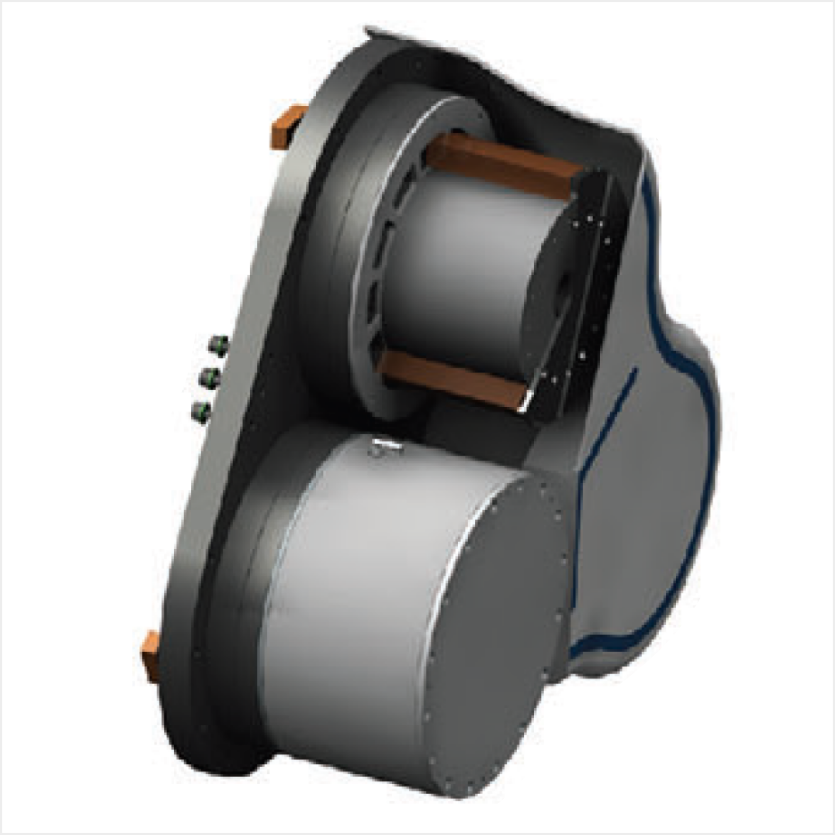
On the Workspace of Electromagnetic Navigation Systems
IEEE Transactions on Robotics, 2022
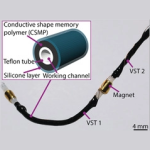
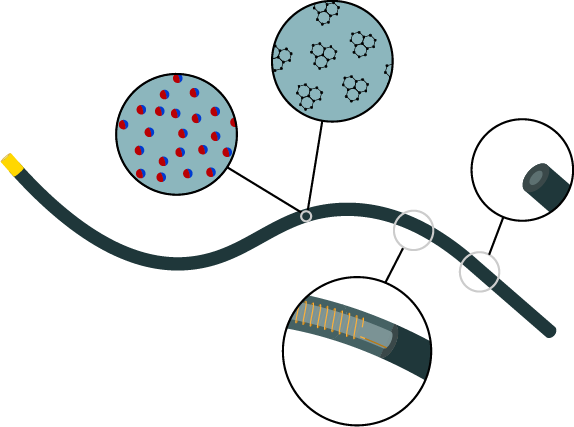
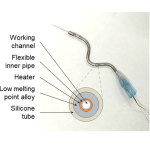
A Variable Stiffness Magnetic Catheter Made of a Conductive Phase-Change Polymer for Minimally Invasive Surgery
Advanced Functional Materials, 2022
Thermoset Shape Memory Polymer Variable Stiffness 4D Robotic Catheters
Advanced Science, 2021
A Submillimeter Continuous Variable Stiffness Catheter for Compliance Control
Advanced Science, 2021
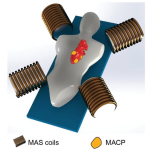
Magnetically Active Cardiac Patches as an Untethered, Non‐Blood Contacting Ventricular Assist Device
Advanced Science, 2020
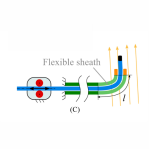
Magnetic Continuum Device with Variable Stiffness for Minimally Invasive Surgery
Advanced Intelligent System, 2019
Design and Evaluation of a Steerable Magnetic Sheath for Cardiac Ablations
IEEE Robotics and Automation Letters 3, 2018