Shape memory polymer variable stiffness magnetic catheters with hybrid stiffness control
Abstract
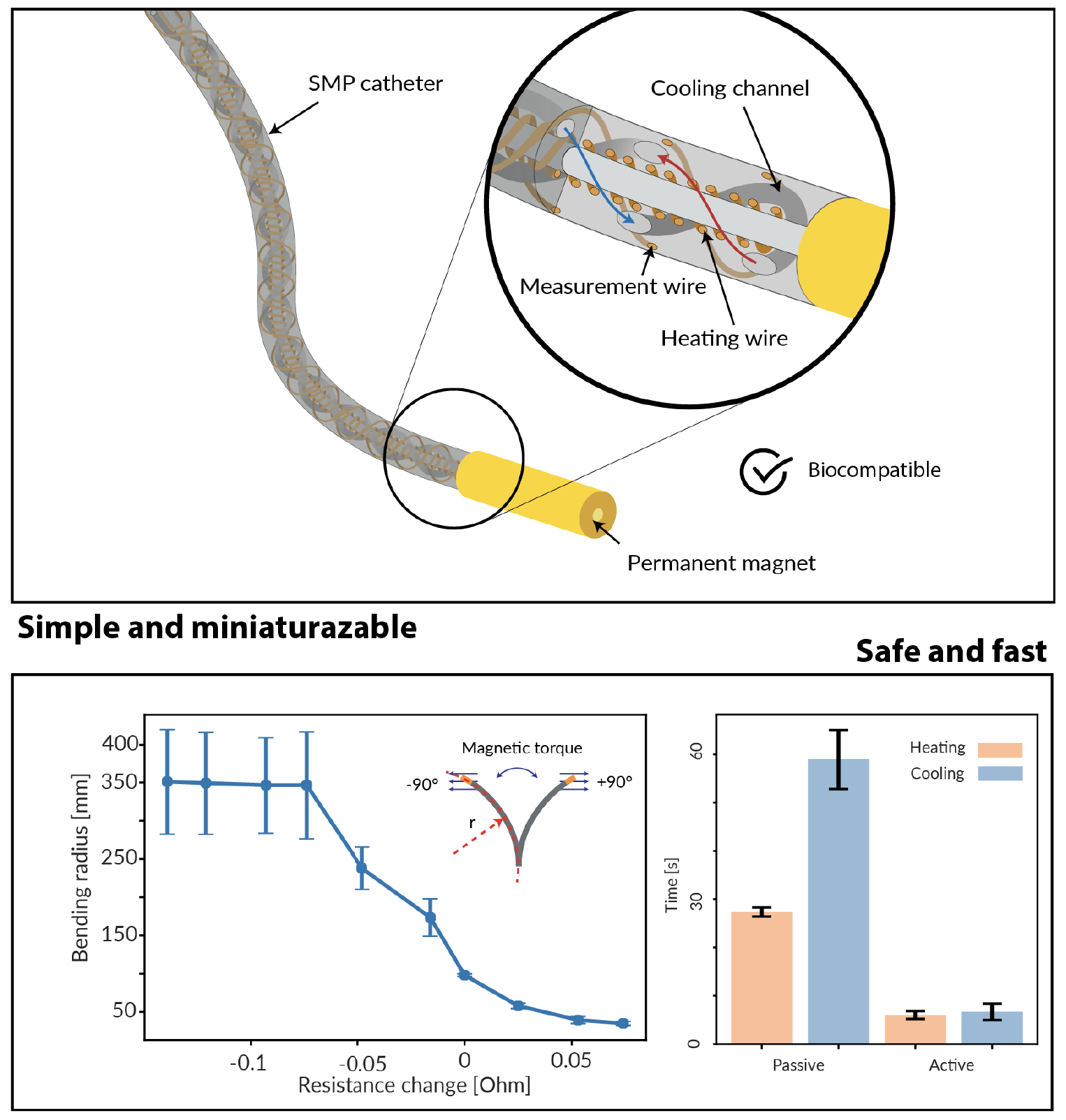
Variable stiffness catheters typically rely on thermally induced stiffness transitions with a transition temperature above body temperature. This imposes considerable safety limitations for medical applications. In this work, we present a variable stiffness catheter using a hybrid control strategy capable of actively heating and actively cooling the catheter material. The proposed catheter is made of a single biocompatible shape memory polymer, which significantly increases its manufacturability and scalability compared to existing designs. Potentially increased safety is obtained by ensuring a lower-risk compliant state at body temperature while maintaining higher stiffness ranges in actively controlled states. Additionally, the combined use of variable stiffness and magnetic actuation increases the dexterity and steerability of the device compared to existing robotic tools.
Bibtex
@inproceedings{mattmann2022shape,
title={Shape memory polymer variable stiffness magnetic catheters with hybrid stiffness control},
author={Mattmann, Michael and Boehler, Quentin and Chen, Xiang-Zhong and Pan{\'e}, Salvador and Nelson, Bradley J},
booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={9589--9595},
year={2022},
organization={IEEE}
}