Modeling Electromagnetic Navigation Systems
News
- January 20, 2021: Our publication was accepted for publication in IEEE Transactions on Robotics!
Abstract
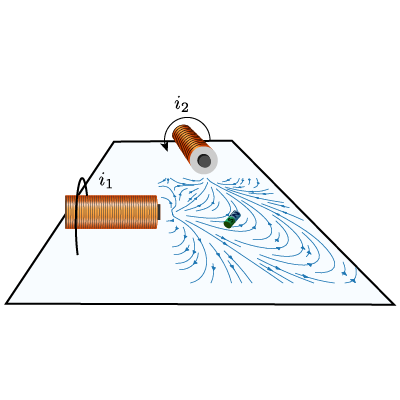
Remote magnetic navigation is used for the manipulation of untethered micro and nanorobots, as well as tethered magnetic surgical tools for minimally invasive medicine. Mathematical modeling of the magnetic fields generated by magnetic navigation systems is a fundamental task in the control of such tools for biomedical applications. We describe and compare several existing and newly developed methods for representations of continuous magnetic fields using interpolation in the context of remote magnetic navigation. Clinical-scale electromagnetic navigation systems feature nonlinear magnetization and magnetization interactions between electromagnets, which renders accurate magnetic field modeling challenging. We first introduce a method that can adapt existing linear models to correct for nonlinear magnetization, with similar performance to the current state-of-the-art nonlinear model. Furthermore, we present a method based on convolutional neural networks that is able to improve on the state-of-the-art method by a factor of 5.4.
Code and Datasets
All code and data from this publication is available as open source software.
Magnetic Field Interpolation (Section III)
-
Magnetic Field Interpolation Code All magnetic field interpolation methods were implemented in MATLAB. The project also contains code for evaluating the different methods and for generating the figures used in the paper.
-
Dataset The experiments run using a pregrenerated synthetic dataset that was generated with the MPEM. These datasets are available for a number of random electromagnet currents (Ne=8) and at various grid sizes from 3 to 32. The dataset is stored in HDF5 files. Make sure to set the correct path to the dataset files in the load_settings.m file.
Electromagnet Driven Magnetic Field Models (Section IV)
- CNN and CNN-DF Models The CNN models are modified from Deep Fluids from Kim et al and trained using Tensorflow 1.15
- Code The code implementing the remaining models and analysis is provided as Jupyter notebooks. This also contains the code for exporting the figures used in the paper.
- Companion Data Data including the training data and pretrained models are provided separately at the ETHZ reseach collection.
Bibtex
@article{Charreyron2021,
author = {L. Charreyron, Samuel and Boehler, Quentin and Kim, Byungsoo and Weibel, Cameron and Chautems, Christophe
and {J. Nelson}, Bradley},
doi = {10.1109/TRO.2020.3047053},
issn = {19410468},
journal = {IEEE Transactions on Robotics},
publisher = {Institute of Electrical and Electronics Engineers Inc.},
title = {Modeling Electromagnetic Navigation Systems},
year = {2021}
}